参考资料:
清华大学数学科学系-线性代数-马辉
《工程数学 线性代数 第六版》 同济大学数学系 高等教育出版社
Linear Algebra by Gilbert Strang MIT麻省理工线性代数公开视频课
正交投影
回顾
首先复习下Ax=b在行空间中的唯一性,从几何直观上看,Ax=b在A的行空间中的唯一解,实际上是所有解在行空间里面的投影。
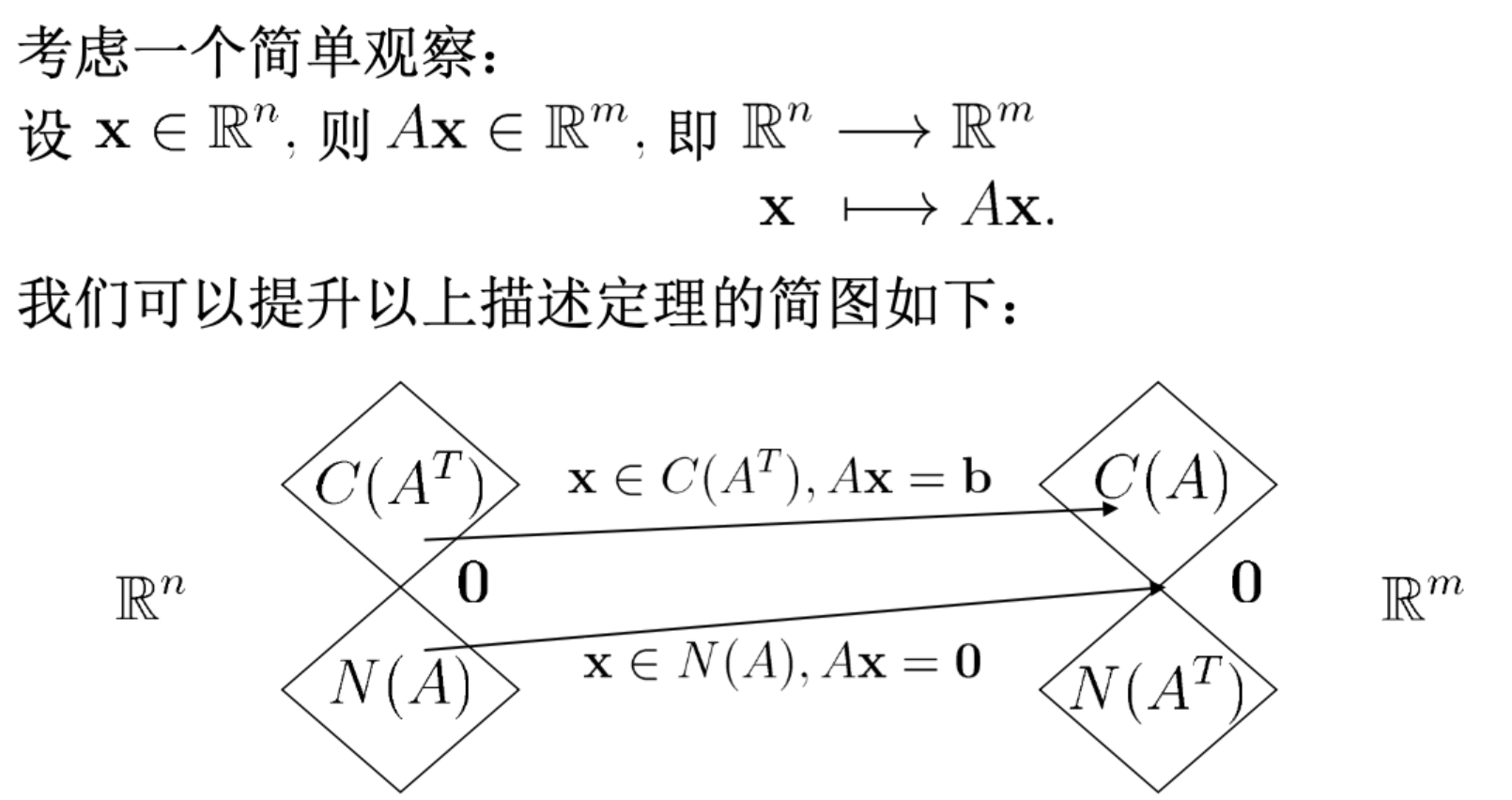
定理:若$A \mathbf{x}=\mathbf{b}$有解,则$A \mathbf{x}=\mathbf{b}$在$C\left(A^{T}\right)$中有唯一解
我们首先学习下投影的概念
点在直线上的投影
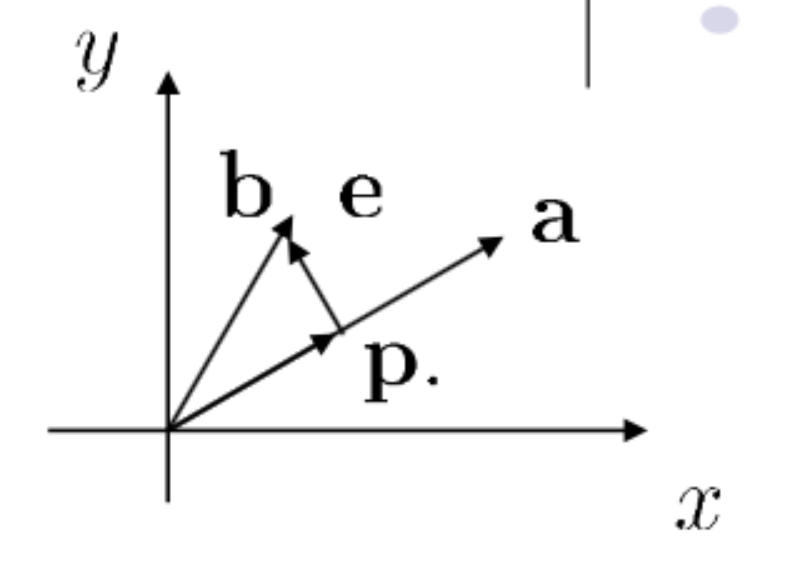
如图所示,求$b$在$a (a \neq 0)$上的投影向量$p$
即$\mathbf{b}$在$\mathbf{a}$上的投影向量为$\left(\frac{\mathbf{a}^{T} \mathbf{b}}{\mathbf{a}^{T} \mathbf{a}}\right) \mathbf{a}=\mathbf{p}$
因此,$\mathbf{p}=\left(\frac{\mathbf{a} \mathbf{a}^{T}}{\mathbf{a}^{T} \mathbf{a}}\right) \mathbf{b}$
其中$S=\frac{\mathbf{a} \mathbf{a}^{T}}{\mathbf{a}^{T} \mathbf{a}}$称为投影矩阵,$S$满足$S^{2}=S, S^{T}=S$
$\forall \mathbf{b} \in \mathbb{R}^{2}$,$S \mathbf{b}$是$\mathbf{b}$在$\mathbf{a}$上的投影向量
点在平面上的投影
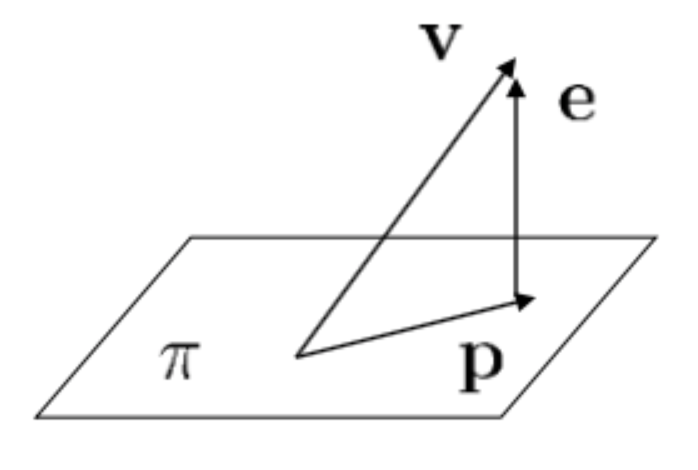
现在我们考虑点在平面上的投影。给定$\mathbf{v}=\left(v{1}, v{2}, v{3}\right)^{T} \in \mathbb{R}^{3}$,平面$\pi : a x+b y+c z=0$。设$\mathbf{P}$是$\mathbf{v}$在$\pi$上的投影,求$\mathbf{P}$。
令$\alpha{1}, \alpha{2}$是平面$\pi$上的两无关向量,即$a x+b y+c z=0$的基础解系或$N((a, b, c))$的一组基。
令$A=\left(\alpha{1}, \alpha{2}\right)$,则平面$\pi=C(A)$,求投影$\mathbf{p} \Longleftrightarrow$求$\mathbf{v}$关于$\mathbb{R}^{3}=C(A)+N\left(A^{T}\right)$的分解$\mathbf{v}{l}+\mathbf{v}{l n}$,其中$\mathbf{v}{l}=\mathbf{p}, \mathbf{v}_{l n}=\mathbf{e} \in N\left(A^{T}\right)$
即$\hat{\mathbf{x}}$是$A^{T} A \mathbf{x}=A^{T} \mathbf{v}$的解。$A^{T} A$是可逆矩阵(A列满秩)$\Longrightarrow \hat{\mathbf{x}}=\left(A^{T} A\right)^{-1} A^{T} \mathbf{v}$,则$\mathbf{p}=A\left(A^{T} A\right)^{-1} A^{T} \mathbf{v}$。
此时,$A\left(A^{T} A\right)^{-1} A^{T}$为投影矩阵
一般地,一个矩阵$P$满足$P^{2}=P, P^{T}=P$,则称$P$为投影矩阵
定理:若$P$是一个投影矩阵,则$C(P)=N(I-P), N(P)=C(I-P)$
证明:从P(I-P)=(I-P)P=0思考
最小二乘法
回到解方程组$A{m \times n} \mathbf{x}=\mathbf{b}$
$A \mathbf{x}=\mathbf{b}$有解$\Longleftrightarrow \mathbf{b} \in C(A)$
假设它无解,则$\mathbf{b} \notin C(A)$,此时问题转化为:
求$\hat{\mathbf{x}}$使得$\Vert A \hat{\mathbf{x}}-\mathbf{b}\Vert$最小,即$\min {\mathbf{x} \in \mathbb{R}^{n}}\Vert A \hat{\mathbf{x}}-\mathbf{b}\Vert$的最小值点。
$\hat{\mathbf{x}}$为最小二乘解(the least square solution)
$A^{T} A \hat{\mathbf{x}}=A^{T} \mathbf{b}$称为法方程组(normal equations)
性质:
1.法方程组总有解(无论A是否列满秩),这是因为$C\left(A^{T}\right)=C\left(A^{T} A\right), A^{T} \mathbf{b} \in C\left(A^{T}\right)=C\left(A^{T} A\right)$
2.$A^{T} A \hat{\mathbf{x}}=A^{T} \mathbf{b}$的解可能有无穷个,但$A \hat{\mathbf{x}}$(投影p)唯一。
3.若A列满秩,则$A^{T} A$可逆,$\hat{\mathbf{x}}=\left(A^{T} A\right)^{-1} A^{T} \mathbf{b}$
最小二乘法的应用:曲线拟合
给定数据$\left{\left(x{1}, y{1}\right), \cdots,\left(x{N}, y{N}\right)\right}$
寻求直线$y=C+D x$,使得误差
最小,即使向量:
的长度最小。
令
即求$\hat{\mathbf{x}}$使得$\Vert A \hat{\mathbf{x}}-\mathbf{b}\Vert$最小。解法方程组$A^{T} A \hat{\mathbf{x}}=A^{T} \mathbf{b}$,即
令$\overline{x}=\frac{1}{N} \sum{i=1}^{N} x{i}, \overline{y}=\frac{1}{N} \sum{i=1}^{N} y{i}$,求得$\hat{C}=\overline{y}-\hat{D} \overline{x}, \hat{D}=\frac{x{1} y{1}+\cdots+x{N} y{N}-N \overline{x} \overline{y}}{x{1}^{2}+\cdots+x{N}^{2}-N \overline{x}^{2}}$
直线$y=\hat{C}+\hat{D} x$称为最小二乘直线。